|
Bo-Ruei (Ray) Huang I am a first-year Ph.D. student in Computer Science at the University of Southern California, advised by Erdem Bıyık in the LiraLab. I received my Bachelor's degrees in Electrical Engineering and Computer Science from National Taiwan University, where I was advised by Shao-Hua Sun in the NTU Robot Learning Lab. In 2024, I visited MIT CSAIL, working with Jiayuan Mao, Xiaolin Fang, Leslie Pack Kaelbling, and Joshua B. Tenenbaum. Previously, in the summer of 2023, I worked with Yuk L. Yung at Caltech GPS. Email (boruei.huang [AT] usc.edu) / CV / Google Scholar / Twitter / GitHub / LinkedIn |

|

USC |

MIT |

Caltech |

NTU |
|---|
News |
ResearchThe goal of my research is to make robots learn to help humans in their daily lives, especially in long-horizon and open-world tasks. I am interested in reinforcement learning, imitation learning, planning, and representation learning. |
Pre-Prints |
|
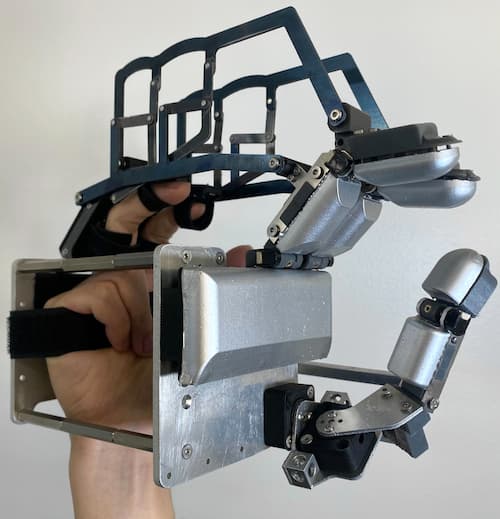
DEXOP: A Device for Robotic Transfer of Dexterous Human Manipulation
Workshop on Dexterous Manipulation @ RSS, 2025 (Best Paper) project page / arXiv / bibtex DEXOP is a hand exoskeleton system designed to teach robots dexterous manipulation in-the-wild with tactile sensing and haptic feedback. |
Publications |
|
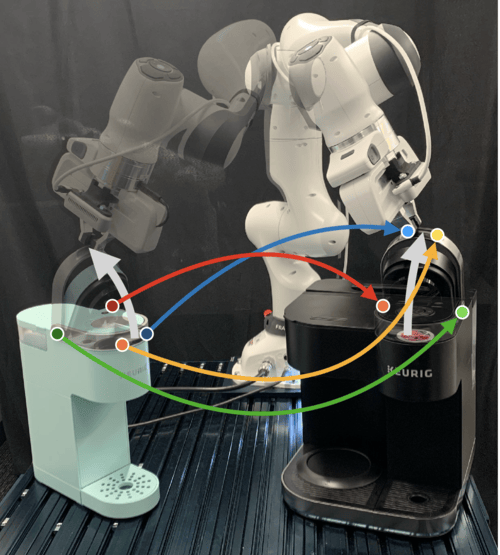
Keypoint Abstraction using Large Models for
Object-Relative Imitation Learning
ICRA, 2025 Workshop on Language and Robot Learning @ CoRL, 2024 (Best Paper) project page / arXiv / bibtex KALM uses VLMs to automatically generate task-relevant keypoints for better generalization in robot manipulation tasks. |
|
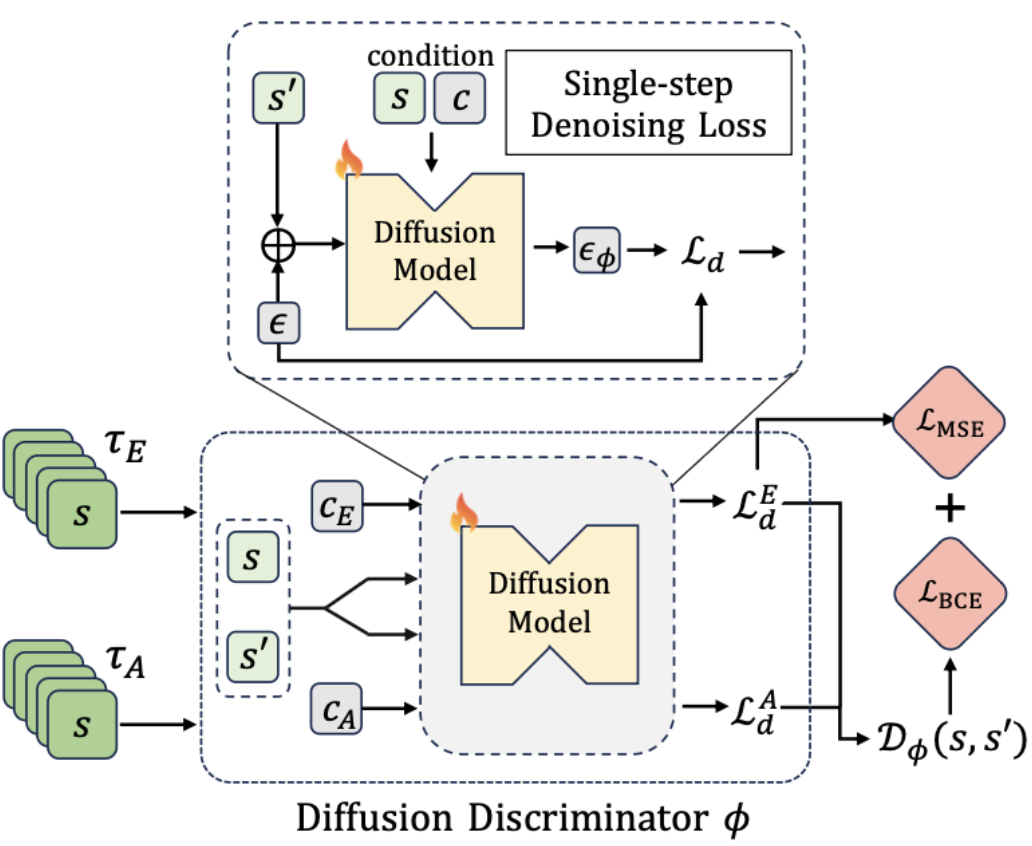
Diffusion Imitation from Observation
NeurIPS, 2024 project page / arXiv / bibtex DIFO is a learning from demonstration algorithm that integrates diffusion models to model state transitions and provide robust rewards to improve policy learning without action labels. |

|
Improving XCO2 Precision in OCO-2/3 Retrievals through
Machine Learning-Enabled Extraction of Volcanic Aerosol
Information from L1B Spectra
AGU, 2023 poster / bibtex An improved machine learning algorithm refines aerosol data from OCO satellite spectra to enhance CO2 retrieval accuracy and advance climate impact models of volcanic aerosols. |
|
|