CURRENT

USC
Ph.D. Student · LiraLab
08/25 → PRESENT
黃柏睿 · PhD @ USC LiraLab · AI, robotics, science
I am a first-year Ph.D. student in Computer Science at the University of Southern California, advised by Erdem Bıyık in the LiraLab.
I received my Bachelor's degrees in Electrical Engineering and Computer Science from National Taiwan University, where I was advised by Shao-Hua Sun in the NTU Robot Learning Lab. In 2024 I visited MIT CSAIL, working with Jiayuan Mao, Xiaolin Fang, Leslie Pack Kaelbling, and Joshua B. Tenenbaum. Previously, in the summer of 2023, I worked with Yuk L. Yung at Caltech GPS.




My research aims to make robots that learn to help humans in their daily lives — especially in long-horizon, open-world tasks where instructions are ambiguous and the environment is unstructured.
I work across reinforcement learning, imitation learning, planning, and representation learning, with a recent focus on leveraging foundation models to bootstrap robust, generalizable behaviors.
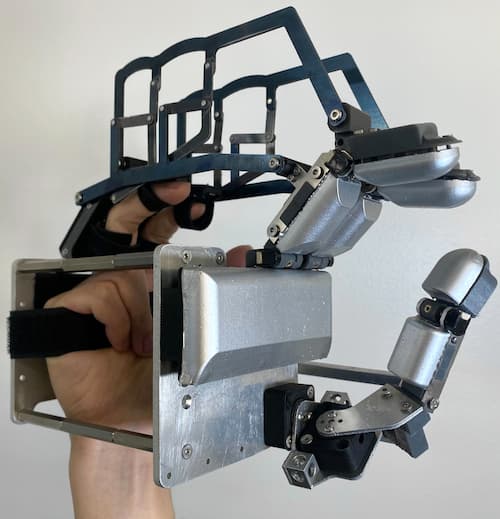
A hand-exoskeleton system that lets robots learn dexterous manipulation in-the-wild — combining tactile sensing with haptic feedback so demonstrations transfer cleanly from human hand to gripper.
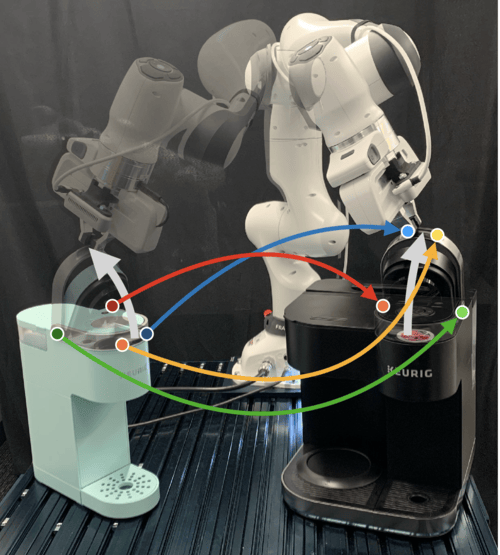
KALM uses VLMs to automatically generate task-relevant keypoints, yielding stronger generalization for object-relative robot manipulation.
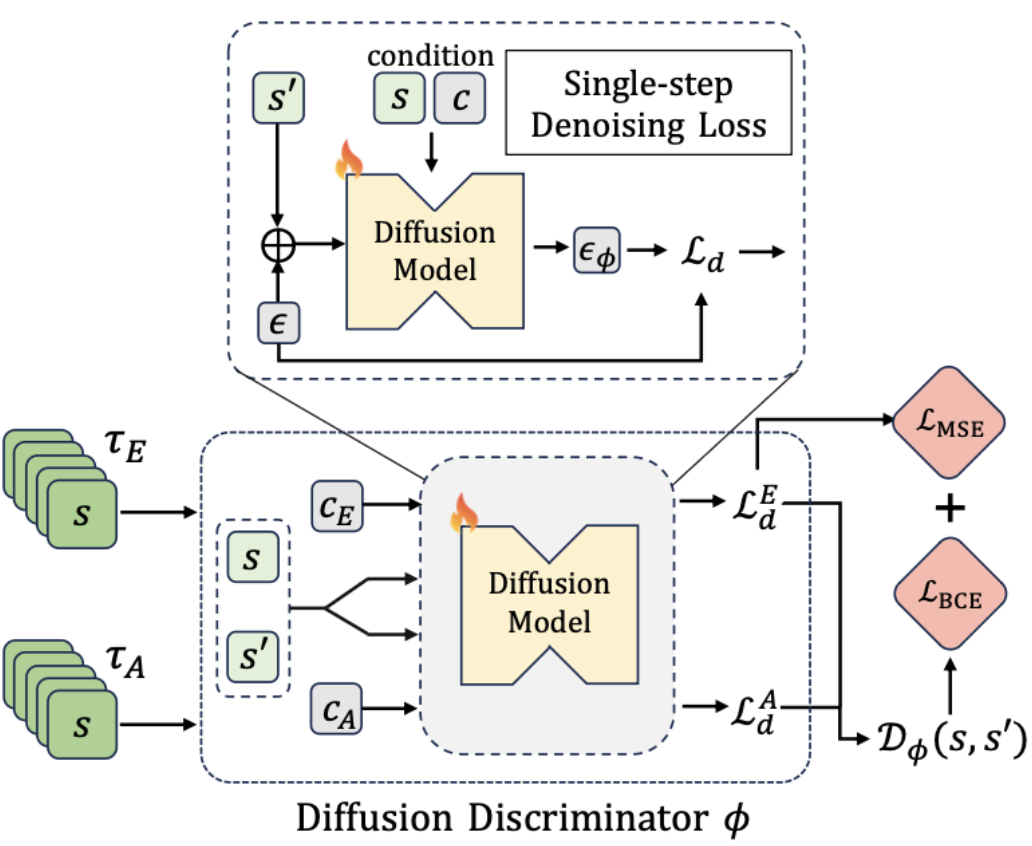
DIFO integrates diffusion models to model state transitions and supply robust rewards — improving policy learning from observation-only demonstrations, without action labels.

A machine-learning pipeline that refines aerosol information from OCO satellite spectra, sharpening CO₂ retrieval accuracy and advancing climate models of volcanic aerosol impact.